


STM32 HAL 库 CAN 通信
1. 前期准备
安装好 STM32CubeMX
安装好 Clion
2. 创建项目
- 配置
CAN外设
在上一章工程基础上添加 CAN 配置如下:
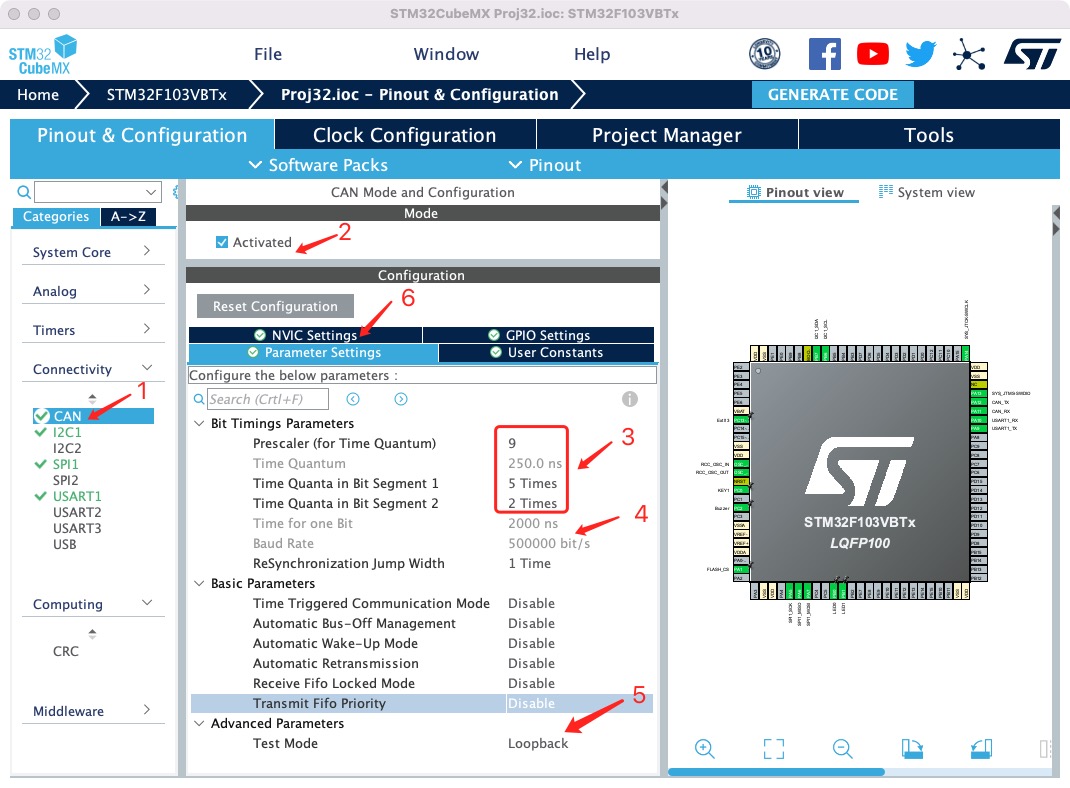
通过组合图中 3 处参数,设置 CAN 通信波特率为 500K,如 4 所示。5 处模式设置为 Loopback,即自发自收模式,不需要外部 CAN 设备也可以测试功能,正常使用时设置为 Normal。同时,开启 CAN 接收中断,点击 6 处的 NVIC Settings,找到 USB low priority or CAN RX0interrupts 选中 Enable。生成项目即可。
3. 编辑代码
- 启动
CAN并开启中断
main.c 中项目自动创建了 CAN 对象 hcan:
CAN_HandleTypeDef hcan;
并添加了 CAN 初始化的基本代码 MX_CAN_Init(void),在该函数的最后手动添加启动 CAN 以及开启中断,代码如下:
/* USER CODE BEGIN CAN_Init 2 */
//启动CAN
if(HAL_CAN_Start(&hcan) != HAL_OK)
{
printf("CAN start Fail!rn");
}
//开启中断,FIFO 0接收消息中断
HAL_CAN_ActivateNotification(&hcan,CAN_IT_RX_FIFO0_MSG_PENDING);
/* USER CODE END CAN_Init 2 */
- 添加
CAN过滤器设置
HAL 库没有自动生成 CAN 过滤,需要进行手动设置,初始化代码如下:
void filter_init(void)
{
HAL_StatusTypeDef HAL_Status;
CAN_FilterTypeDef Filter0;
Filter0.FilterBank = 1;//滤波器编号
Filter0.FilterMode = CAN_FILTERMODE_IDMASK;
Filter0.FilterScale = CAN_FILTERSCALE_32BIT;
Filter0.FilterIdHigh = 0x00;
Filter0.FilterIdLow = 0x00;
Filter0.FilterMaskIdHigh = 0x00;
Filter0.FilterMaskIdLow = 0x00;
Filter0.FilterFIFOAssignment = CAN_FILTER_FIFO0;
Filter0.FilterActivation = CAN_FILTER_ENABLE;
HAL_Status = HAL_CAN_ConfigFilter(&hcan,&Filter0);
if(HAL_Status != HAL_OK)
{
printf("CAN Filter set Fail!code:%drn",HAL_Status);
Error_Handler();
}
}
在 main.c 的 MX_CAN_Init(void) 函数之后调用即可。
3. 配置 CAN 接收中断回调函数
当接收到 CAN 数据后,在回调函数中处理即可,在 main.c 重定义接收中断回调函数如下:
//重定义CAN接收中断回调函数
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
{
HAL_StatusTypeDef HAL_Status;
if(hcan->Instance == CAN1)
{
HAL_Status = HAL_CAN_GetRxMessage(hcan,CAN_RX_FIFO0,&RxHeaderCAN,RxDataCAN);
if(HAL_Status == HAL_OK)
{
//处理接收数据
CAN_Rx_Flag = 1;
}
}
}
如上代码所示,将接收数据存储在 RxDataCAN[] 数组中,置位接收完成标志位 CAN_Rx_Flag。其中,RxHeaderCAN、RxDataCAN、CAN_Rx_Flag 为自定义的全局变量。至此,完成了全部 CAN 驱动代码编写。
4. CAN 发送、接收示例
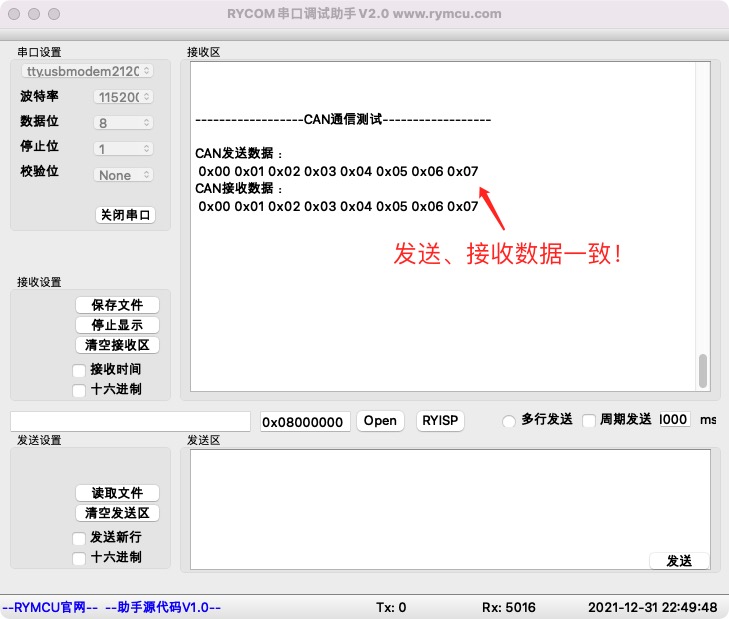
前面我们将 CAN 设置为 Loopback 模式,即可以接收到自己发送的数据。示例功能为:通过 CAN 发送数据,并接收它,串口打印,对比收发数据是否一致。
在 main.c 中添加测试代码:
添加全局变量:
//CAN全局变量
CAN_TxHeaderTypeDef TxHeaderCAN;
CAN_RxHeaderTypeDef RxHeaderCAN;
uint8_t TxDataCAN[8],RxDataCAN[8];
uint8_t CAN_Rx_Flag=0;//CAN接收标志
添加发送数据函数:
void CAN_Test(void)
{
//发送数据CAN
TxHeaderCAN.ExtId = 0x1800F001;
TxHeaderCAN.DLC = 8;
TxHeaderCAN.IDE = CAN_ID_STD;
TxHeaderCAN.RTR = CAN_RTR_DATA;
TxHeaderCAN.StdId = 0x01;
TxHeaderCAN.TransmitGlobalTime = ENABLE;
uint32_t TxMailBox;
HAL_StatusTypeDef HAL_Status;
printf("rnrn------------------CAN通信测试------------------rnrn");
for (int i = 0; i < 8; ++i) TxDataCAN[i] = i;
printf("CAN发送数据:rn");
for (int i = 0; i < 8; ++i) printf(" 0x%02x",TxDataCAN[i]);
printf("rn");
HAL_CAN_AddTxMessage(&hcan,&TxHeaderCAN,TxDataCAN,&TxMailBox);
}
main.c 中调用上述 CAN_Test() 完成数据发送,在 main.c 的 while(1) 循环中检测接收标志 CAN_Rx_Flag,并打印接收数据,代码如下:
while (1)
{
//处理CAN接收数据
if(CAN_Rx_Flag)
{
CAN_Rx_Flag = 0;//清空CAN接收标志
printf("CAN接收数据:rn");
for(int i = 0;i<8;i++) printf(" 0x%02x",RxDataCAN[i]);
printf("rn");
}
}
5. 编译下载
将程序编译下载至开发板,并将开发板连接至 PC,打开串口调试助手 RYCOM,并设置为:115200+8+N+1,接收结果如下。
6. 小结
本章学习了 CAN 数据发送、接收功能的具体实现。

加油!!!!